# Transparent Object Manipulation for Robots - IROS
Objective
iCeiRA 當時有一個 project 是想要做實驗室自動化,因為我們希望讓機器人彈性地切換任務,所以我們選擇用 PR2 來當作開發的機器人平台,而不是一堆偏向純機械的自動化設備。
若要做到這件事,能夠辨識並抓取實驗室裡面常常出現的燒杯等透明儀器就很重要。
Related Work
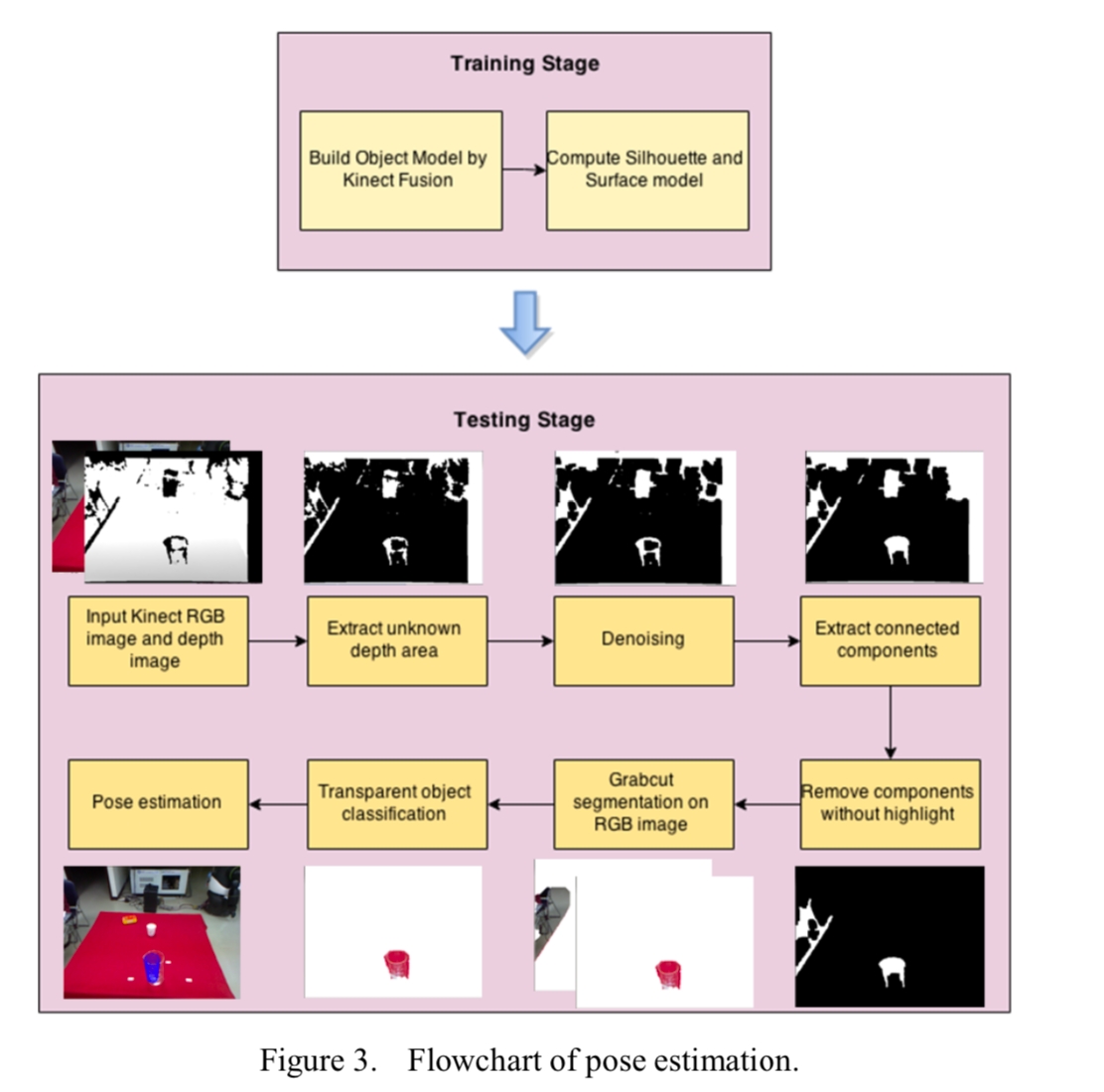
Method
Preprocessing for better segmentation
我們這一篇主要是優化 GrabCut 的 Seed,減少拿到錯誤 candidate 的機率。優化流程如下:
怎麼計算 highlight?
用 0 - 255 來 threshold image,每個 threshold 都會保留不同的pixel
計算每張 threshold 完的圖剩下多少 perimeter pixel(在邊緣上的點)
算出一個 histogram
分別從 255 開始往回走,每加一個點就重新 fit 一條直線
當直線斜率開始大增的時候,就表示開始不是 highlight 了
Code 可以在這邊找到:
https://github.com/Po-Jen/transparent_objects/commit/064032f4316a43a7e3f7b0bb154b322fa90eeafa
怎麼計算每個輪廓的周邊 pixel 有哪些 & 中間是哪些?
先對偵測到的 candidate 邊緣做 dilation,得到 dilation 完的 pixel。
dilation 完的 pixel - 在 candidate 內的 pixel = candidate 周邊 pixel
計算 candidate 內 pixel 跟 周邊 pixel 的 hue histogram,比較兩者差距
Pose estimation
這邊是用別人的黑盒子,細節並沒有知道得很詳細。之後再慢慢補充。
怎麼 train?
怎麼 match?
怎麼避免 clutter?
Result
雖然在 accuracy 上沒有顯著提升,但是 precision 提升很多,所以機器人就不會把不是真正透明物體的地方錯誤辨識成透明物體。
Impact
讓實驗室有一個基本的版本可以再更深入研究。
FAQ
Challenges a. 手有時大/有時小 b. 不是每個 frame 都可以偵測到手
Mistakes/Failures a. IROS 投稿失敗
Enjoyed a.
Leadership
Conflicts
What you'd do differently
為什麼用這個方法不用 CNN based 方法?
當初的方法還無法對 segmentation 做得很好,但我們需要 silhouette 才能做 pose estimation。
知識補充
Connected component 計算
可以參考 Leetcode - Number of Islands(用 DFS)
相關資料
Last updated